INTERBUS
Francisco Javier Moreno
Rivas
N.C. 828815
MK5
N.C. 828815
MK5
1.
INTRODUCCIÓN A LOS BUSES DE CAMPO
2.
VENTAJAS DE LOS BUSES DE CAMPO
3.
TABLAS COMPARATIVAS DE LOS BUSES
ACTUALES
a) COMPARACIÓN GENERAL
b) COMPARACIÓN DE CABLEADO (REDUNDANCIA)
c) COMPARACIÓN DE NÚMERO DE NODOS Y ACCESO AL MEDIO
d) COMPARACIÓN DE TAMAÑO DE MENSAJES Y DETECCIÓN DE ERRORES
4.
INTRODUCCIÓN A INTERBUS
5.
GENERALIDADES
6.
HISTORIA DE INTERBUS
7.
CARACTERÍSTICAS GENERALES
8.
ELEMENTOS BÁSICOS. CAPA FÍSICA
a) TARJETA CONTROLADORA
b) BUS REMOTO
c) MÓDULOS TERMINALES DE BUS
d) SUBANILLO
9.
MEDIOS FÍSICOS Y DISTANCIAS
10. DETALLES DE LA CAPA FÍSICA
11. MÉTODO DE ACCESO AL MEDIO
12. CAPA DE ENLACE
a) DATOS
b) IDENTIFICACIÓN
c) CAPA DE APLICACIÓN
d) CONCLUSIÓN
13. CARACTERÍSTICAS GENERALES
a) 2.1 FUNCIÓN PRINCIPAL
b) PROTOCOLO DE COMUNICACIÓN
c) CONFIGURACIÓN
d) SOFTWARE DE ADMINISTRACIÓN
e) DIAGRAMA/TOPOLOGÍA
f) VELOCIDADES DE
TRANSMICION
14. ESTRUCTURA
15. MÉTODO DE OPERACIÓN
16. CONFIGURACIÓN DEL SISTEMA
a) ELEMENTOS DE BUS
b) SEGMENTOS DE BUS
i.
SEGMENTO DE BUS REMOTO
ii.
SEGMENTO DE BUS LOCAL
iii.
SEGMENTO DE LAZO INTERBUS
17. CONFIGURACIÓN DE RED
18. PROTOCOLO DE TRANSMICION
19. TRANSMISIÓN DE DATOS
a) 4.1 ESTRUCTURA DEL PROTOCOLO
b) 4.2 TRANSMISIÓN DE BITS
20. EFICIENCIA
21. FUENTES/BIBLIOGRAFÍA
1.
INTRODUCCIÓN A LOS BUSES DE CAMPO

Un bus de campo es un sistema de transmisión de información
(datos) que simplifica enormemente la instalación y operación de máquinas y
equipamientos industriales
Sustituye las conexiones punto a punto entre los elementos
de campo y el equipo de control a través del tradicional bucle de corriente de
4-20mA.
Cada dispositivo de campo incorpora cierta capacidad
(“inteligencia”) de proceso con un costo bajo.
Cada uno de estos elementos ejecuta funciones simples de
diagnóstico, control o mantenimiento, así como de comunicarse
bidireccionalmente a través del bus.

2.
VENTAJAS DE LOS BUSES DE CAMPO
La principal ventaja que ofrecen los buses de campo
es la reducción de costos debido a:
Ahorro en instalación:
Sólo se requiere un cable para la conexión de diversos nodos
Ahorro en mantenimiento:
fácil de monitorizar el sistema, aumenta la fiabilidad y la detección de
errores.
Ahorros derivados de la mejora del funcionamiento
del sistema: Flexibilidad en el diseño, la instalación es fácil de ampliar,
los dispositivos de campo poseen algoritmos de control propios.
Sólo incluyen tres capas: física, enlace y
aplicación, y un conjunto de servicios de administración. El usuario sólo se
debe preocupar de la capa física y de usuario.
InterBus: Bus de campo alemán de uso
común en aplicaciones medias
3. TABLAS COMPARATIVAS DE LOS BUSES ACTUALES
a) COMPARACIÓN GENERAL

b)
COMPARACIÓN DE CABLEADO
(REDUNDANCIA)

c)
COMPARACIÓN DE NÚMERO DE NODOS Y
ACCESO AL MEDIO

d)
COMPARACIÓN DE TAMAÑO DE MENSAJES
Y DETECCIÓN DE ERRORES

4. INTRODUCCION A INTERBUS

INTERBUS es un " bus de campo. " Esta categoría de sistema de
red es un cable de conexión utilizado en aplicaciones industriales. Un
"bus" es una topología de red en la que un solo cable lleva a cabo a
partir de un dispositivo de control, con ramas que conducen a varios
dispositivos controlados.
INTERBUS es un bus
de campo para la interconexión de sensores y actuadores. Las partes claves de
INTERBUS han sido estandarizadas en Alemania por la DKE (Deutsche
Elektrotechnische Kommission para DIN y VDE). En 1993, se publicó la norma DIN
E 19 258. Esta norma cubre los protocolos de transmisión y los servicios que
necesita para la comunicación de datos de proceso. Las especificaciones para la
transmisión de parámetros han sido publicadas en DIN Report 46 (1995)
5.
GENERALIDADES
La interfaz
INTERBUS fue desarrollada por la compañía Phoenix Contact. La especificación se
ha utilizado ampliamente desde 1987 y los componentes INTERBUS son ofrecidos
por más de 200 fabricantes. INTERBUS es un sistema de bus sensor/accionador
rápido, universal y abierto con un maestro y varios esclavos.
6.
HISTORIA DE INTERBUS
Este bus es
conocido originalmente como Interbus-S, su diseño fue comenzado a trabajar en 1983
por Phoenix Contact. El trabajo continuó
junto con fabricantes de computadoras y
escuelas técnicas, y se desarrolló un protocolo y definición de
hardware para un bus sensor-actuador con capacidad de tiempo real y fue
presentado en la Feria de Hanover en
1987. El principal campo de aplicación de este
sistema de bus era la velocidad optimizada de la
transmisión en tiempo-determinista de los datos del sensor-actuador (datos de proceso). En los
siguientes años, una amplia y variada
gama de componentes de bus y dispositivos de campo serían desarrollados por
Phoenix Contact y otros fabricantes.
Interbus-S se convirtió en uno de los líderes mundiales en sistemas de
buses de campo en la automatización industrial.
.
7.
CARACTERÍSTICAS GENERALES

Protocolo propietario, inicialmente, de la empresa Phoenix
Conctact GmbH, aunque posteriormente ha sido abierta su especificación.
Normalizado bajo DIN 19258, norma europea EN 50 254.
Fue introducido en el año 1984.
Topología en anillo y comunicación mediante un
registro de desplazamiento en cada nodo. Se pueden enlazar buses periféricos al
principal.
Basado en un esquema
maestro-esclavo.
Capa física basada en RS-485.
Cada dispositivo actúa como repetidor. Así se puede alcanzar
una distancia entre nodos de 400 m para 500Kbps y una distancia total de 12 KM.
Es posible utilizar también enlaces de fibra óptica.
Capa de transporte basada en una trama única que
circula por el anillo (trama de suma)
La información de direccionamiento no se incluye en los
mensajes, los datos se hacen circular por la red. Alta eficiencia.
Es muy sensible a corte completo de comunicación al
abrirse el anillo en cualquiera de los nodos.
La estructura en anillo permite una fácil localización de
fallos y diagnóstico.
Apropiado para comunicación determinista a alta
velocidad.
8.
ELEMENTOS BÁSICOS. CAPA FÍSICA

·
Tarjeta controladora
·
Bus remoto
·
Módulos terminales de bus
·
Subanillo
a) TARJETA CONTROLADORA
Se corresponde con el maestro.


Controla y monitoriza el tráfico de datos.
Transfiere los datos de salida con los
correspondientes módulos.
Recibe los datos de entrada.
Se pueden visualizar los datos de diagnógstico y
error que son transmitidos al host del sistema.
b)
BUS REMOTO

La tarjeta controladora se conecta al bus remoto.
Los datos se transmiten físicamente a través de:
·
Cables de cobre (estándar RS-485)
·
Fibra óptica
·
Infrarrojos
Puede transportar la alimentación de los módulos
I/O y sensores, además de las líneas de transmisión de datos
c) MÓDULOS TERMINALES DE BUS

Se conectan al bus remoto.
Dividen al sistema en segmentos individuales
Permiten desconectar ramificaciones del anillo
durante la operación.
Hacen la función de amplificadores (repetidores) de
señal
Aíslan eléctricamente los segmentos del bus.
d) SUBANILLOS

Corresponde a la zona del sistema donde se conectan
sensores y actuadores.
Respecto a las especificaciones técnicas:
Distancia entre dispositivos 2 cm <d<20 m
Expansión total de 200 m
Limitado a 63 dispositivos
De 19.2 V a 30 V
Alimentación y datos van por el mismo cable
9. MEDIOS FISICOS Y DISTANCIAS

10. DETALLES DE LA CAPA FÍSICA

Basado en esquema
maestro-esclavo
Los bit se
transmiten a 500 kbp con método NRZ (non-return-to-zero).Comunicación
full-duplex (envío y recepción simultánea).
16 bits por nodo de
entrada o salida
Los relojes son
sincronizados internamente.
Rápido: 4096 I/O’s
en 7 ms 265 nodos x 16 I/O’s= 4096 puntos digitales
11. MÉTODO DE ACCESO AL MEDIO

Cada dispositivo tiene reservado un slot de tiempo adecuado
para su función dentro del sistema.
El tiempo de ciclo es la suma de los tiempos asignados a
cada dispositivo.
Pueden definirse slots adicionales para la transmisión de
bloques de datos en modo de conexión.
Se podrán enviar grandes bloques de datos a través de
Interbus sin alterar el tiempo de ciclo para los datos de proceso.
Todos los elementos insertan sus datos en el bus
simultáneamente, así las medidas de los lazos de control serán simultáneas.
12. CAPA DE ENLACE

Garantiza la integridad de los datos y permite el soporte de
dos tipos de tramas: datos de procesos y parámetros de identificación.
Es determinista: garantiza un tmáx para el transporte
de datos.
Control de acceso al medio mediante TDMA (acceso
múltiple por división de tiempo, elimina colisiones de la transmisión).
El acceso al bus se realiza usando registros de
desplazamiento sincronizados.
a) DATOS

La trama de datos se forma por concatenación de los
datos de cada estación, a través de un registro.
Cada dispositivo se une al anillo mediante un
registro cuya longitud depende de la cantidad de información a transmitir
Los datos llegan al master en función de su
posición dentro del anillo.
Cada ciclo de transmisión es una secuencia de datos
que comienzan por la palabra loopback+datos de salida de los
dispositivos+CRC (cyclid redundancy check) de 32 bits
b) IDENTIFICACIÓN

Los ciclos de identificación permiten la administración
del bus.
Cada dispositivo tiene un código de identificación
que indica el tipo de dispositivo de que se trata, y el tamaño de su bloque de
datos.
La configuración del bus se lleva a cabo por una
secuencia de ciclos de identificación.
El maestro empieza a leer en orden, la
identificación de los dispositivos conectados.
En función de estas lecturas se configura la trama
que circulará en el ciclo de datos
c) CAPA DE APLICACIÓN
Implementa en la capa de aplicación un subconjunto
de servicios denominados PMS (Peripherals Message Specification)
Incluye 25 servicios que permiten la comunicación
con dispositivos de proceso inteligentes.
Por ejemplo se pueden establecer y monitorizar
conexiones, lectura y escritura de parámetros o la ejecución remota de
programas
d) CONCLUSIÓN
Desde el punto de vista físico INTERBUS funciona
según un procedimiento asíncrono de parada y arranque.
Se envía una cabecera que contiene información
adcional como delimitadores de trama, código de función y tipo de mensaje,
junto a 8 bits adicionales.
Los momentos de inactividad se ocupan con mesajes
de estado.
No contienen datos de la capa de enlace y sólo
sirven para garantizar una actividad permanente en el medio de transmisión.
Si dicha actividad se interrumpe durante más de 20
ms se interpreta como una caída del sistema.
Los dispositivos se desconectan de la red y van a
un punto seguro definido con antelación
13. CARACTERÍSTICAS GENERALES
a) FUNCIÓN PRINCIPAL

Interbus es
instalado en el sistema a ser automatizado como un simple circuito de línea
compacto siguiendo una dirección. Un tablero de control proporciona la interface entre un PLC o una PC industrial
(IPC) y Interbus. El sistema de bus conecta todos los componentes de I/O
presentes en el sistema (conocidos también como dispositivos INTERBUS) con el
sistema control/computadora a través de una tarjeta controladora.
b) PROTOCOLO DE COMUNICACIÓN

El protocolo
INTERBUS, el cual ha sido específicamente optimizado para requerimientos de
tecnología de automatización, transmite tanto bit de datos como finales de
carrera o dispositivos de conmutación (datos de proceso) como programas complejos o
registros de datos de dispositivos de campo inteligentes (datos de parámetros)
con el mismo nivel de eficiencia y seguridad. La figura 1 muestra la estructura
básica de un PLC INTERBUS.
c)
CONFIGURACIÓN

Cada dispositivo
conectado al Interbus tiene una tarjeta controladora mediar entre él y el bus .
Interbus se conecta a los sistemas de oficina a través de una red
Ethernet.
d) SOFTWARE DE ADMINISTRACIÓN
Para la planificación y parametrización de su sistema de
INTERBUS ponemos a su disposición los programas IBS CMD (para tarjetas de
conexión estándar) e IBS PC WORX (para el empleo de controladores de campo
(FC) y controladores de campo remoto (RFC)). Así podrá Vd.
planificar, programar y visualizar confortablemente todos los aparatos
integrados en el sistema INTERBUS.
IBS CMD sustituye superficies específicas de fabricante para
la configuración, supervisión/monitorización y diagnóstico de instrumentos de
campo.
Las funciones complejas para la aplicación en órdenes
superiores a los aparatos concretos están compiladas de forma clara. Todos los
aparatos pueden ser parametrizados, operados y diagnosticados desde una
estación central.
PC WORX ofrece, además de las funciones del CMD, una
superficie o pantalla de programación conforme a IEC 61131-3 y, opcionalmente,
una visualización del proceso.
IBS CMD está disponible para tarjetas de conexión INTERBUS
de la generación 3 y generación 4, en diferentes versiones. Puesto que IBS RL
SYS PRO UM SP sólo es aplicable con una microprogramación a
partir de la versión 4.4x, se tomará aquí en consideración sólo la generación
4.
PC WORX presupone que se usan deteminadas tarjetas de
conexión de la generación 4 (FC, controlador de campo / RFC, controlador de
campo remoto). FC (controlador de campo) / RFC (controlador de campo remoto)
sólo pueden ser configurados y parametrizados con PC WORX. Los programas
discurren por completo en el FC (controlador de campo) / RFC (controlador de
campo remoto), de manera que el PC host queda libre para tareas de mando y
visualización.
e) DIAGRAMA/TOPOLOGÍA

Topología anillo activo
_ Maestro-Esclavo con
longitud fija msg.
_ Todos los nodos con
repetidor
_ Velocidad 500 Kbps
_ Longitud bus
_ 400 m entre dispositivos
_ 13 Km longitud total
_ Aplicación:
Sensor/actuador, control ind

INTERBUS se basa en un esquema MAESTRO-ESCLAVO. El maestro
del bus actúa simultáneamente como interfaz con los niveles superiores de la
jerarquía de comunicaciones. La topología de funcionamiento interno es en
anillo, es decir, todos los dispositivos están conectados formando un camino
cerrado aunque el aspecto del cableado es un bus. El anillo principal es el que
parte del maestro, aunque pueden formarse otros anillos para adaptarse a la
estructura particular de cada sistema. Este tipo de conexiones se lleva a cabo
mediante unos equipos denominados módulos terminadores de bus.
f) VELOCIDADES DE
TRANSMICION
Un rasgo distintivo de INTERBUS es que las líneas de envío y
recepción de datos están contenidas dentro de un mismo cable que une todos los
dispositivos. De esta forma, el sistema tiene el aspecto físico de un bus o un
árbol. Típicamente, la capa física se basa en el estándar RS-485. Debido a la
estructura de anillo y que es necesario transportar la masa de las señales
lógicas. INTERBUS requiere un cable de cinco hilos para interconectar dos
estaciones. Con velocidades de transmisión de 500 Kbps. Pueden alcanzarse
distancias de hasta 400m entre dispositivos. Cada dispositivo incorpora una
función de repetidor que permite extender el sistema hasta una longitud total de
13 Km. Para facilitar el funcionamiento de INTERBUS, el numero máximo de
estaciones esta limitado a 512.
LA estructura punto a punto de INTERBUS y su división de
anillo principal y subanillos para la incorporación de distintos medios de
transmisión de distintas zonas de la planta si esto fuese necesario. La
estructura de anillo ofrece dos ventajas.
La primera
es que permite el envío y recepción simultanea de datos (full dúplex).
En segundo lugar, la capacidad de autodiagnóstico del
sistema se ve mejorada, ya que la conexión de cada nodo a la red es activa.
INTERBU permite la detección preventiva de errores por medio de una evaluación
estadística de la calidad de las transmisiones. LA determinación de la
frecuencia de los errores de transmisión permite prever la aparición de fallo
en un componente de red.
Para facilitar la
detección de errores y la puesta en marcha del sistema. INTERBUS permite la
desconexión transparente de los subanillos conectados al anillo principal. El
direccionamiento se basa en la posición física de cada sistema dentro del
anillo, aunque opcionalmente se dispone de la posibilidad del empleo de
direcciones lógicas para acceder a dispositivos individuales independientemente
de su posición.
La velocidad de transmisión de datos y la expansión del bus
son independientes entre sí. La velocidad de transmisión bruta de datos es
500kBit/s y la velocidad de transmisión neta de datos es 300kBit/s. Para
aplicaciones especiales con cable de fibra óptica, es posible alcanzar
velocidades de transmisión de datos de 2Mbit/s. El número de usuarios se limita
a 512.
14. ESTRUCTURA

Un sistema INTERBUS tiene una estructura anular. Una
ramificación compacta que sigue una determinada dirección en el sistema es
utilizada para la conexión de bus. Comenzando en el maestro (PLC o IPC), el
sistema de bus conecta el respectivo control o los respectivos sistemas
informáticos con los módulos periféricos de entrada y salida. A la línea
principal del sistema se le llama bus remoto y puede cubrir distancias de hasta
12,8 km entre las estaciones periféricas. Desde el bus remoto, es posible
instalar líneas ramales. Estos ramales pueden ser un bus remoto de instalación
o un bus local. La transferencia de datos se efectúa utilizando el protocolo
marco "shift register with sum" (en un ciclo de datos todos los datos
son dislocados a través del anillo).
15. MÉTODO DE OPERACIÓN

INTERBUS trabaja con un método de acceso master/slave, en el
cual el master también establece la
conexión a el más alto nivel de control o sistema de bus. En términos de
topología, INTERBUS es un sistema anillo con conexión activa a los dispositivos
de comunicación.
Comenzando por el INTERBUS master, la tarjeta controladora,
todos los dispositivos están conectados activamente en el sistema anillo. Cada
dispositivo INTERBUS (slave) tiene dos líneas separadas para la transmisión de
datos: uno para transferir los datos de ida y otro para transferir los datos de
vuelta. Esto elimina la necesidad de una línea de retorno desde el último hasta el primer dispositivo, necesario
en un sistema de anillo simple.
Las líneas de ida y vuelta se encuentran en un cable. Desde
el punto de vista de instalación, INTERBUS es similar a la estructura de bus o
lineal, donde un solo cable de bus conecta un dispositivo con el siguiente.
Para habilitar la estructuración de un sistema INTERBUS,
sistemas de subanillos (segmentos de bus) pueden ser formados sobre el anillo
principal, la fuente del cual es el master. Estos sistemas de subanillos están
conectados con acopladores de bus (conocido también como módulos terminales de
bus). La figura 5 ilustra la estructura básica de un sistema INTERBUS con un
anillo principal y dos sistemas en subanillo.
El bus remoto es instalado desde la tarjeta controladora.
Los dispositivos de bus remoto y los acopladores de bus son conectados al bus remoto. Cada bus
acoplador conecta el bus remoto con un
sistema de subanillo. Hay dos tipos diferentes de sistemas en subanillo,
los cuales están disponibles en
diferentes versiones de instalación:
El bus local (conocido formalmente como el bus I/O) es
responsable de la gestión local, conecta dispositivos de bus local, y es
típicamente usado para formar estaciones compactas de I/O locales por ejemplo
en la cabina de control. Está también disponible como versión robusta para
montajes directos en sistemas-máquinas.
La rama de bus remoto conecta dispositivos de bus remoto y
conecta dispositivos distribuidos a largas distancias. Las ramas de bus remoto
pueden ser usadas para instalar topologías de red complejas, las cuales son
ideales para procesos técnicos complejos a largas distancias.
El cable de bus remoto INTERBUS forma una conexión RS-485 y
debido a la estructura de anillo y la necesidad adicional de un conductor de
compensación entre dos dispositivos de
bus remoto, se requiere de cinco cables.
Debido a los diferentes métodos físicos de transmisión, el
bus local está disponible con 9 cablesy niveles TTL para distancias cortas
(hasta 1.5m [4.92 ft.]) y un cable de dos hilos con interface de corriente
basada en TTY para distancias medias (hasta 10m [32.81 ft.]).
La función de amplificación integrada en cada dispositivo de
bus remoto hace que la expansión total del sistema INTERBUS pueda alcanzar los
13 km (8.08 mi). Para que el sistema sea fácil de operar, el número de dispositivos INTERBUS está limitado a un máximo de 512.
INTERBUS trabaja como un registro de desplazamiento, el cual
es distribuido a través de todos los dispositivos de bus y usa el método
summation frame basado en las I/O para la transmisión de datos. Cada
dispositivo de bus tiene memoria de datos, los cuales son combinados a través
de la conexión anillo del sistema de bus para formar un gran registro de
desplazamiento. La figura 6 muestra el principio de transmisión de datos.
Un paquete de datos en la summation frame es validado por el
master en el envio por el registro de desplazamiento. Los paquetes de datos
contienen todos los datos que serán transmitidos a los dispositivos de bus
(datos de salida). Los registros de datos correspondientes en los dispositivos
de bus contienen los datos a ser transmitidos a el master (datos de
entrada)(Figura 6a).
El dato de salida es ahora transferido desde el master al
dispositivo y el dato de entrada es transferido desde los dispositivos a el
master en un ciclo de dato. El master comienza enviando la palabra de lazo de
regreso (loop-back) a través del anillo. Al final del ciclo de dato el master
recibe la palabra de lazo de regreso. La cadena del lazo de regreso saca el
dato de salida a lo largo detrás de el mientras empuja el dato de salida a lo
largo delante de el. Esto es llamado transmisión de datos full dúplex (Figure
6b).
Los dispositivos no tienen que estar explícitamente
direccionados, como la posición física de un dispositivo en el anillo es
conocida y el master puede colocar la información que será transmitida en este
punto en el telegrama summation frame.
En el ejemplo, el primer dato word después del lazo de regreso es direccionado
al slave 4, por ejemplo.
La cantidad de usuarios de datos a ser enviados a través del
anillo corresponde a la longitud total del dato de todos los dispositivos de
bus. Los acopladores de bus son integrados dentro del anillo pero no proveen
ningún dato de usuario. Un ancho de datos entre 1 bit y 64 bytes por dirección
de dato son permitidos en un dispositivo INTERBUS.

16. CONFIGURACIÓN DEL SISTEMA
a) ELEMENTOS DE BUS
Un sistema INTERBUS comprende los elementos mostrados en la
Figura 7: el bus master, el bus acoplador, dispositivo de bus, y el bus remoto,
también las conexiones de bus local.

El bus master es la única comunicación master en el sistema
de bus en anillo INTERBUS y por lo tanto controla todas las secuencias en el
anillo. Tiene una interface de salida (o) sobre la cual todos los dispositivos
INTERBUS restantes que actúan como
slaves de comunicación están conectados. El bus master está disponible como una
tarjeta controladora para varios sistemas
host (computadoras industriales, sistemas de buses PLCs VME, transputer
systems, etc) y realiza las siguientes tareas:
·
Transferencia de datos entre el
sistema host y el dispositivo de bus
·
Gestión de bus (configuración,
detección de error, reconfiguración)
·
Comunicación entre dispositivos de
bus
Dependiendo del tipo de tarjeta controladora, esta puede
también hacerse cargo del programa de control de todo el proceso.
La tarea del bus master requiere potencia de cómputo
adecuado. Las tarjetas controladoras por lo tanto están equipadas con un
microprocesador de gran alcance (usualmente un Motorola 68332), el cual es
responsable únicamente de las funciones del INTERBUS master.
Esencialmente, el firmware de este procesador master
comparte la funcionalidad y facilidad de uso del sistema INTERBUS.
El acoplador de bus está conectado a un cable de bus remoto
de entrada (i) como muestra la Figura 8, por lo tanto proporciona acceso a las interfaces de salida
(o1, o2). El acoplador de bus es también llamado módulo terminal de bus en la práctica, divide el sistema de anillo
INTERBUS en segmentos de bus y se opera así mismo como un slave de comunicación.
Cada acoplador de bus tiene al menos una interface de bus remota de entrada y
de salida. Hay disponibles interfaces
para la conexión de bus remota adicionales o cables de bus local. La
figura 8 muestra los tipos de acoplador de bus que hay disponibles.

El acoplador de bus estándar mostrada en la Figura 8 conecta
un segmento de bus local o remoto a buses remotos. Los acopladores de buses
adicionales no pueden ser usados en el segmento de bus conectado.
El acoplador de bus con una cuarta interface adicional en la
Figura 8b puede ser usado para configurar redes complejas con adaptación óptima
a el sistema de configuración.
Para apoyar al diagnóstico
de error y la configuración del sistema anillo, los acopladores de bus
pueden activar y desactivar las interfaces de salida bajo el control del bus
master (Figura 9)
Los dispositivos de bus son slaves de comunicación en
el bus anillo, los cuales tienen una
interface de entrada y salida y establecen también la conexión a las señales
del proceso en el formato requerido (binario, análogo, digital). Dispositivos
de bus remotos y locales están disponibles dependiendo si este es operado en un
segmento de bus remoto o local.
El sistema de
anillo es configurado a través de los acopladores y dispositivos de bus. Si una
interface de salida en un acoplador o dispositivo de bus no está conectado, por
ejemplo, un cable de bus no ha sido conectado, este elemento de bus producirá
un cortocircuito en la interface interna automáticamente (Figura 9).

b) SEGMENTOS DE BUS
Un segmento de bus es una serie de dispositivos de bus y
conectores de bus, lo cuales empiezan en el bus master o en un bus acoplador y
termina en el siguiente bus acoplador o en cualquier dispositivo de bus que no
tenga una interface de salida.
INTERBUS distingue entre los siguientes tipos básicos de
segmento de bus basado en el método de transmisión física de cada bus conector:
Segmento de bus remoto
Segmento de bus local
Segmento de Lazo INTERBUS
§ SEGMENTO DE BUS REMOTO
Un segmento de bus remoto normalmente empieza con un
acoplador de bus apropiado (módulo terminal de bus) y comprende conectores de
bus remoto y un máximo de 256 dispositivos de bus remoto (Figura 10).
El segmento de bus remoto es un tipo especial, el cual
empieza directamente en el bus master y comprende un máximo de 256 dispositivos
de bus remoto. Las características de un segmento de bus remoto son dadas en
las especificaciones básicas para un bus remoto en la Tabla 1.
El máximo número de dispositivos de bus remoto no está
limitado por el protocolo así los dispositivos no necesitan ser direccionados
explícitamente. Para mantener la claridad, el firmware master más reciente
limita el número posible de dispositivos de bus remoto conectados a 256.
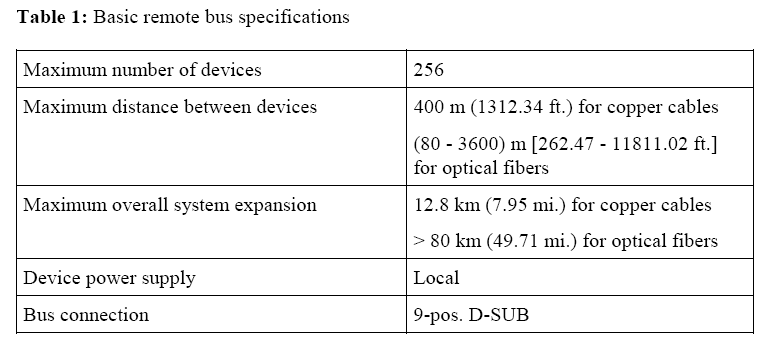

En teoría los buses remotos pueden soportar la transmisión
en cobre en acerca de 102.4 km (63.63 mi.). Sin embargo, el sistema está
actualmente limitado a una expansión máxima de 12.8 km (7.95 mi.), con el fin
de asegurar que el tiempo de testing para la configuración máxima permanezca en límites razonables. La expansión puede ser
incrementada usando fibra óptica.
Cada dispositivo de bus remoto tiene una fuente de poder
local siendo eléctricamente aisladas del
segmento de bus de salida. En la transmisión basada en línea, las señales de
bus remoto son transmitidas de acuerdo a las propiedades eléctricas de la
interfase – DIN 66 259 Part 4 (corresponde a
RS-485). Así como las terminales de bus remoto, los dispositivos de bus
remoto pueden ser simples o dispositivos I/O inteligentes.
§ SEGMENTO DE BUS LOCAL

Un segmento de bus local empieza en un acoplador de bus con
una interface de salida de bus local y comprende las conexiones de bus local y
los dispositivos de bus local. En el segmento de bus local, una estación
comprende el segmento de bus local completo junto con el correspondiente bus
acoplador.
El bus local ( conocido formalmente como el bus I/O) es
diseñado para transmitir a distancias cortas. Un campo de aplicación típico es
una cabina de control local o cajas de control. En el bus local, todos los
cables de señales para los sensores y actuadores están combinados y conectados
al dispositivo de bus local. Por la
corta distancia entre dos dispositivos, estos dispositivos que usan cables de
cobre no tienen una interface RS-485 y la transmisión de datos se la hace en
niveles TTL. Esto restringe la expansión espacial de un segmento de bus local.
La máxima distancia entre dos dispositivos de bus local es 1.5m (4.92 ft.) y la
expansión total de un segmento de bus local no debe exceder los 10 m (32.81
ft.).
En adición de las
líneas de datos, las conexiones de bus local también albergan las líneas de
suministro de energía para los módulos electrónicos de los dispositivos de bus
local. La fuente de poder para todos los dispositivos de bus en un segmento de
bus local están proporcionadas centralmente por la unidad de suministro de
energía del acoplador de bus. Esto significa que los dispositivos de bus local
solo necesitan una fuente de poder para los sensores/actuadores conectados.
Los segmentos de
bus local están disponibles en varias versiones de instalación. Esta incluye en
particular:
·
Segmentos de bus local con local
bus ST
·
Estaciones INLINE
·
Segmento de bus local con fibra
óptica

La versión de instalación estándar para dispositivos
INTERBUS son segmentos de bus local con local bus ST, las cuales están
combinadas con un módulo terminal de bus apropiado para formar una estación ST,
habilitando la formación de estaciones compactas y flexibles de I/O.
Los dispositivos de bus local individuales son diseñados
como dispositivos de bloque terminales y son encajados a presión en carriles
DIN. Los módulos electrónicos son módulos plug-in, mientras los
sensores/actuadores están conectados a un bloque de terminales aterrizados. El
bus local ST (Smart Terminal) es un cable corto plano que conecta los
dispositivos locales de bus a través de conectores traseros. La estructura de
una estación ST es mostrada en ala Figura 11.
La distancia entre dispositivos de bus ST y la expansión de
una estación ST está limitada por ña longitud del cable de bus local ST. Por lo
tanto, la longitud máxima de una estación ST es aproximadamente 1m (3.28 ft.).
La fuente de poder central a los dispositivos de bus local y
la falta de regeneración de señales de datos limita el número de dispositivos de
bus en el bus local. El límite físico es
determinado por la corriente máxima que puede ser suministrada por la unidad de
suministro de energía del bus acoplador. El firmware master también impone un
límite lógico. Actualmente, un máximo de 8 dispositivos de bus local son
soportados para buses locales SL y ST.
La fuente de poder para las I/O (sensores y actuadores)
están proporcionadas localmente a través de conexiones externas).
Estaciones INLINE las cuales como estaciones ST son basadas
en bloques de terminales, son otro tipo de segmento de bus local. Sin embargo,
son precisamente más calificadas, por permitir hacer configuraciones más
flexibles de estaciones INTERBUS compactas y de específicas aplicaciones.
Los dispositivos de bus local individuales son conocidos como terminales de
automatización y la versión disponible más pequeña es un módulo I/O con 2
canales. La Figura 12 muestra un ejemplo de una estación INLINE con 7
terminales de automatización digitales I/O, de los cuales 3 son terminales de entrada
de dos canales (DI2) y 4 son terminales
de salidas de dos canales (DO2).

Conectando los terminales de automatización ajustándolos a
un riel DIN lado a lado crea automáticamente un sistema de rieles de 10-pos. El
cual puede manejar el paso del cableado requerido por la línea de bus y la
fuente de poder. El sistema de rieles de poder es conocido como un INLINE
POTENTIAL JUMPER y funciona como un bus local. (Figura 13).
El poder de comunicación de todos los terminales de
automatización son proporcionados centralmente a través de terminales de bus.
Circuitos de I/O eléctricamente aislados pueden ser creados usando terminales
especiales de poder INLINE (SEG in Figure 12). Los terminales de poder
interrumpen el puente jumper potencial, haciéndolo posible de agregar nuevos
circuitos. El suministro de voltaje puede estar entre 24 y 230 V. Grupos de
circuitos adicionales (circuitos segmentados) pueden ser creados en circuitos
I/O a través de terminales de segmento Inline.

§ SEGMENTO DE LAZO INTERBUS

Distancia entre dispositivos
_ Mínima 20 cm
_ Máxima 20 m
_ Distancia
total 200 m
_ Máximo
63 dispositivos
_ Alimentación
y comunicación mismo cable
_ Potencia máxima
1.8ª
A diferencia de los segmentos de bus local, cuyos componentes se diferencian solamente en
términos de la tecnología de instalación, el Lazo INTERBUS (lazo sensor, IP 65
bus local) ofrece un nuevo método de transmisión física. Los dispositivos
individuales son conectados a través de un cable de dos hilos sin blindaje
formando un anillo. Los datos y la fuente de poder de 24 V para alrededor
de 32 sensores están también alimentados
a través de este cable. La Figura 14 muestra la configuración de un segmento de
Lazo INTERBUS. E n
Los datos son transmitidos como señales de corriente
independiente de carga, el cual tiene un alto nivel de inmunidad a
interferencias que acostumbran haber en las señales de voltaje. El dato
transmitido es modulado usando código Manchester con una fuente de voltaje de
24V (INTERBUS usa normalmente el código NRZ). Las características físicas del
bus son convertidas por un apropiado módulo de bus terminal, que puede ser
conectado al anillo INTERBUS en cualquier punto de un segmento de bus remoto.
El lazo INTERBUS
tiene las siguientes características:
Expansión: 100m
(328.08 ft.), máximo
Distancia entre dos
dispositivos:
10m (32.81 ft.), máximo
Número de dispositivos: 32,
máximo
Corriente en los dispositivos
(consumo): 1.5 A. máximo
Medio de conexión:
Cable de dos líneas no blindado, 2 x 1.5 mm2
Uno de los principales campos de aplicación del Lazo
INTERBUS son las conexiones de dispositivos con IP 65 e IP 64 individuales directamente en el
sistema. Una amplia gama de funciones y
dispositivos están disponibles como dispositivos de bus.
El protocolo INTERBUS no es convertido en cualquier modo en
un Lazo INTERBUS, lo cual significa que gateways complejas no son requeridos y
un segmento de Lazo INTERBUS puede ser usado en conjunto con cualquier tipo de
dispositivo INTERBUS. En un sistema INTERBUS el escaneo de datos es enteramente
sincrónico en todas las partes. A pesar de esto la alta velocidad de escaneo es
mantenida.
17. CONFIGURACIÓN DE RED
Un sistema INTERBUS es configurado conectando los
dispositivos de bus uno después de otro en un anillo. Los acopladores de bus
segmentan el anillo de acuerdo a los requisitos de la aplicación.
Con INTERBUS G4 (Generación 4) y las siguientes, es posible instalar
topologías de red complejas, las cuales pueden ser optimizadas para la
estructura del sistema de automatización, integrando acopladores de bus con una
conexión de bus adicional. Hay dos maneras de estructurar la configuración de
este tipo de red INTERBUS:
Divide la red completa en varios niveles.
Asigna número de dispositivos de segmentos específicos .
Ambos métodos de configuración serán explicados usando el
ejemplo de una configuración de red INTERBUS con 4 niveles, como se ilustra en
la Figura 15.
L a red se divide en 4 niveles diferentes empezando con el
bus master en la línea de bus remoto
principal como el primer nivel. Las líneas de ramas secundarias son asignadas a
un segundo nivel. Los dispositivos conectados a estas líneas pueden formar
subestructuras adicionales, etc. De este modo, se puede lograr una profundidad
de anidado de un máximo de 16 niveles. La secuencia es tal como un bus local
(formalmente conocida como el bus I/O) en un segmento de bus remoto siempre es
asignado al siguiente nivel.
La asignación de números de dispositivos de segmentos
específicos pueden ser automática de acuerdo
a la configuración física o pueden ser libremente especificadas por el
usuario. El número contiene dos componentes:
<Número de dispositivo>=<Número de segmento de
bus>.<Número de posición en el segmento de bus>
Según este patrón, el segundo dígito del número del
dispositivo para todos los dispositivos remotos es cero, ejemplo 1.0. El
segundo dígito es solo usado por dispositivos de bus local (ejemplo, módulos I/O) conectados abajo del dispositivo
remoto, ejemplo, 1.1.
Los acopladores de bus con una rama adicional de bus remoto
aparecen como dos dispositivos de bus remoto separados con una rama de bus remota/local, ejemplo,
acoplador de bus 1.0/2.0. La rama de bus remoto es asignada al siguiente número
consecutivo cuando se asigna físicamente
a este tipo de dispositivos de bus remoto, por ejemplo, 3.0. Cualquier
otra subrama adicional a esta rama le será asignado el siguiente número
consecutivo, por ejemplo, 4.0, 5.0, etc. El bus remoto de salida de la rama es
contado como el último componente, por ejemplo, 8.0.
La numeración de dispositivos es una herramienta estructural
y no debería ser confundida con el direccionamiento del dispositivo. Aunque los
números de los dispositivos pueden ser usados para propósitos de
direccionamiento, esto no es absolutamente necesario.
18. PROTOCOLO DE TRANSMICION
Maestro-Esclavo
_ Una
sola trama en comunicación
_ Un
espacio en la trama para cada
dispositivo
_ Variables de salida – escribe el
maestro
_ Variables entrada – escribe el
dispositivo
_ Baja sobrecarga
del protocolo
El protocolo de transmicion de INTERBUS se estructura en
tres capas que se corresponden con capas del modelo OSI. LA capa 1 es la capa
física. Especifica aspectos como la velocidad, modulos de codificación de la
señal física. Etc. La capa 2 se corresponde con la capa de enlace. Garantiza la
integridad de los datos y permite el soporte de dos tipos de datos, por una
parte los datos correspondientes a procesos cilicos, y por otra parte datos que
aparecen asíncronamente. La capa de enlace es determinista, es decir, garantiza
un tiempo máximo para el transporte de datos entre dispositivos. El
control de acceso al medio se encuadra dentro de los mecanismos TDMA (Time
Dicision Multiple Access), eliminando asi la posibilidad de colisiones, Cada
dispositivo tiene reservado un slot de tiempo adecuado para su función dentro
del sistema. El tiempo de ciclo es la suma de los tiempos asignados a cada
dispositivo. Pueden definirse slots adicionales para la transmicion debloques
de datos en modo conexión. De esta forma pueden enviarse grandes bloques de datos
a través de INTERBUS, sin alterar el tiempo de ciclo para los datos del
proceso.
Otra ventaja importante que incormporta este tipo de control
de acceso al medio, es que todos los elementos insertan sus datos en el bus
simultáneamente, lo que garantiza que las mediciones en las que se basan los
bucles de control, fueron realizadas simultáneamente.
Este mecanismo también reduce la sobrecarga con información
correspondiente al protocolo, con lo que la eficiencia que se alcanza es alta.
La trama que se forma por concatenación de los datos de cada
estación. De forma física se realiza mediante un registro. Cada dispositivo se
une al anillo mediante un registro cuya longitud depende de la cantidad de
información que debe transmitir. Los datos provenientes de las distintas
estacionesllegando al master en función de su posición dentro del anillo. Cada
ciclo de transmicion comienza con una secuencia de datos que contiene la
palabra de “loopback” seguida de los datos de salida de los distintos
dispositivos, en la línea de salida. Durante el envio de datos, el flujo de
retorno entra el maestro como flujo de entrada. Tras el envio de la trama
completa, se envia un CRC de 32 bits. Debido a la estructura de conexiones
punto a punto, el cálculo del CRC siempre se hace entre cada dos nodos. Por
último se envia una palabra de control para indicar el estado de cada
dispositivo (detección de errores de transmicion, etc.) Si no hubo errores
comienza un nuevo ciclo.
Ademas de los ciclos de datos, también hay ciclos de
identificación. Este ciclo permite la admisión del bus. Cada dispositivo tiene
un código de identificación que indica el tipo de dispositivo que se trata, y
el tamaño de su bloque de datos. La configuración del bus se lleca a cabo por
una secuencia de ciclos de identificación en los que el maestro comienza a leer
en orden, la identificación de los dispositivos conectados. En función de estas
lecturas se configura la trama que circulara en el ciclo de datos.
19. TRANSMISIÓN DE DATOS
a) ESTRUCTURA DEL PROTOCOLO
El protocolo INTERBUS está basado en el modelo de referencia
OSI y por razones de eficiencia solo
toma en cuenta las capas 1,2 y 7 (Figura 16).
Ciertas funciones de las capas 3 a 6 han sido incluidas en la capa de
aplicación.
La capa física (capa 1) define tanto las condiciones de
tiempo (tales como la velocidad de transmisión, fluctuación admisible, etc.)
como los formatos de codificación de la información. La capa de enlace de datos
(capa 2) asegura la integridad de datos y el manejo cíclico de la transferencia
de datos a través del bus usando el protocolo summation frame. Los métodos de
transmisión y los protocolos en las capas 1 y 2 pueden ser encontrados en DIN
19 258.
Siguiendo a la capa de enlace de datos, el acceso de datos
en los dispositivos INTERBUS toma lugar en la capa de aplicación como sea
requerido a través de dos canales de datos diferentes:
a)
El
canal de proceso de datos sirve de principal uso de INTERBUS como un bus
sensor/actuador. El intercambio cíclico de datos de I/O entre el sistema de
control de más alto nivel y los sensores/actuadores conectados es llevado a
cabo a través de este canal.
b)
El
canal de parámetros suplementa intercambio de datos cíclicos con puntos
individuales de I/O en conexión orientada al intercambio de mensajes. Este tipo
de comunicación requiere empaque de datos adicionales cuando más grandes
cantidades de información estén siendo intercambiadas entre los partners de comunicación individuales. Los
datos se transmiten a través de servicios de comunicación basado en el modelo
cliente/servidor.
Los dispositivos INTERBUS casi siempre tienen un canal de
proceso de datos. Un canal de parámetros puede ser montado también como una
opción extra.
Durante la operación, un sistema INTERBUS requiere
configuraciones que deben ser hechas y
suministran una amplia gama de información de diagnóstico. Esta información es
procesada por un gestor de red en cada capa. También se puede acceder y evaluar
información más detallada sobre preparación para operación, estados de error
y datos estadísticos, y hacer ajustes en la configuración de red.
La estructura de protocolo híbrido de INTERBUS para las dos
diferentes clases de datos (datos de proceso y datos de parámetros) y su
transmisión de datos independientes a través de dos canales es un factor
decisivo en el rendimiento del protocolo INTERBUS. El protocolo permite la creación de una red sin fisuras
que comprende los sistemas de control y dispositivos de campo inteligentes
adecuados a sensores y actuadores individuales.
b) TRANSMISIÓN DE BITS

En la capa 1, los bits son transmitidos en un estándar de
velocidad de transmisión de datos de 500
kbps de acuerdo al método NRZ (non-return to zero). La línea de datos es
escaneada en los dispositivos INTERBUS 16 veces más rápido, con el fin de maximizar
las diferencias admisibles en tiempos de ejecución entre los flancos de subida
y bajada de un bit en un telegrama.
Si se utiliza un cable INTERBUS de dos líneas como estándar,
una señal de reloj no es transmitida.
Un generador de reloj de 16 MHz que provee de un pulso de
reloj interno de 500 KHz opera en cada dispositivo. Los dispositivos de reloj
están sincronizados internamente por un marcador común de sincronización en los
telegramas INTERBUS activos.
El dato es transmitido en INTERBUS en forma de datos de byte
codificados. El protocolo completo summation frame está dividido en porciones
de 8 bits y son transmitidos entre dos dispositivos INTERBUS en telegramas, un
formato similar a UART.
Los dos formatos de telegrama mostrados en la figura 17 son usados para codificar líneas.
·
Status
del telegrama: Este telegrama es de longitud 5 bits. Es usado para generar
actividad en el bus durante pausas en
transmisiones y para transmitir el status de la señal SL (select).
·
Telegrama
dato: los telegrama datos tansmiten datos de usuario entre dos dispositivos. Un
telegrama dato comprende 5 bits de
información en el encabezamiento y 8 bits de datos de usuario. Para suplementar
la información en el telegrama de estatus, el encabezamiento del telegrama dato
contiene un bit adicional, el cual indica el estatus de la señal CR (control).
Telegramas activos son procesados en los dispositivos
INTERBUS usando protocolos lógicos y varios registros de desplazamiento.
20. EFICIENCIA

21. FUENTES/BIBLIOGRAFÍA